
Fig. 8.
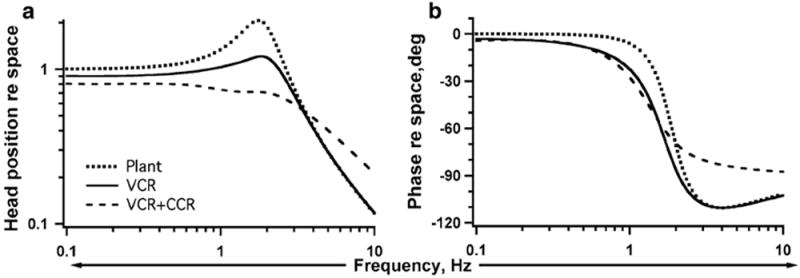
Effects of the VCR and the combined VCR and CCR on H, the head position re space in response to sinusoidal trunk position perturbations with a gain = 1 and a phase = 0°. Curves are based on calculations from the Peng et al. (1996) model. Details as in Fig. 6 and “Appendix”. Bode plots of gain (a) and phase (b) in the absence of reflex control (Plant) and with the VCR alone (CCR = 0) and with CCR present (KCCR = 1.0). In all cases, the VCR gain (KVCR = 30). At low frequencies (<1 Hz), the head stabilization is negligible (i.e., the head and trunk are nearly aligned at gain ≈ 1 and phase ≈ 0°). Near the resonant frequency (≈2 Hz), the VCR increases stiffness and damping, thereby decreasing the resonant peak. At higher frequencies, the head stabilizes as a result of its inertia, rather than reflex actions; the near absence of reflex compensation is indicated by the plant and VCR curves being almost superimposable. The CCR antagonizes stabilization