
Figure 1.
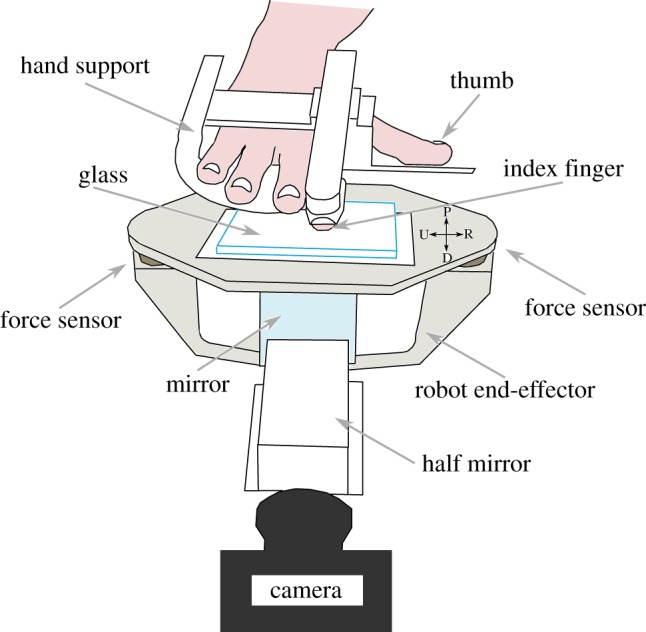
Apparatus used for the experiment. Top: Subject's hand is resting in the hand support, with the right index finger fixed. Middle: The end-effector of the robot (U-shaped, in grey) translates precisely in any direction. It bears the stimulus plate, made of smooth transparent glass, by two force/torque transducers. Bottom: Imaging system comprises a camera, a half mirror and a full mirror (detailed in figure 2). (Online version in colour.)