
Fig. 5.
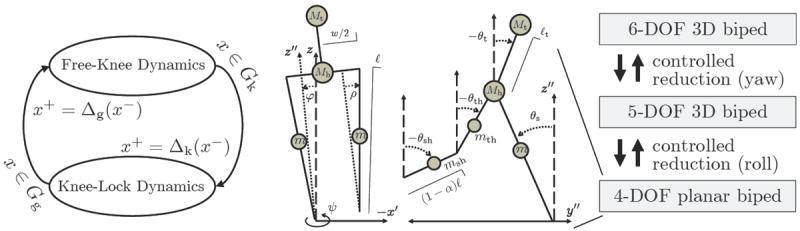
Diagrams of the 3D biped’s hybrid system (left), frontal and sagittal planes (center), and controlled reduction (right). The control strategy dynamically decouples the 4-DOF dynamics of the sagittal plane by reducing the yaw DOF of the transverse plane and the lean DOF of the frontal plane.