
Figure 5.
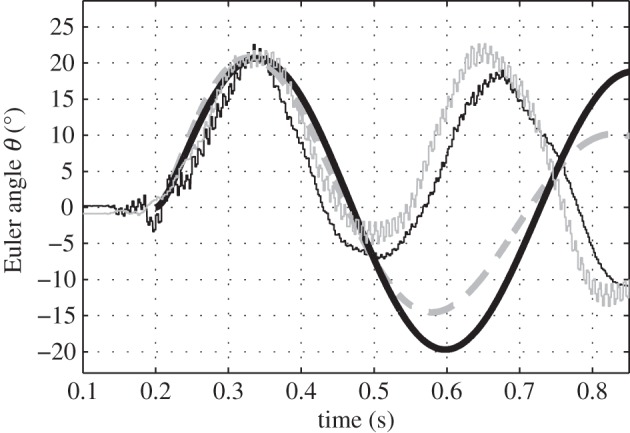
An empirical test of the robotic fly in flight with angular velocity feedback alone from motion capture, with a gain of kd = 1.0 × 10−7 (just at the threshold of stability), shows that it undergoes rotational oscillations. The unfiltered Euler angles θ1 and θ2 measured by motion capture (rotation about body x-axis and y-axis, respectively) are shown in black and grey. A linear simulation of the robotic fly dynamics (equation (3.8)) with the same gain, an initial lateral velocity of 0.3 m s−1 (thick black line), and parameters from table 1 shows similar behaviour, providing empirical support of the model proposed in equation (3.8). If the wire tether is incorporated into the model as a torsional spring (§3.2), then it has a small effect on dynamics (dashed line). Other differences may be due to effects not accounted for in the model such as un-modelled aerodynamic forces.