
Fig. 5.
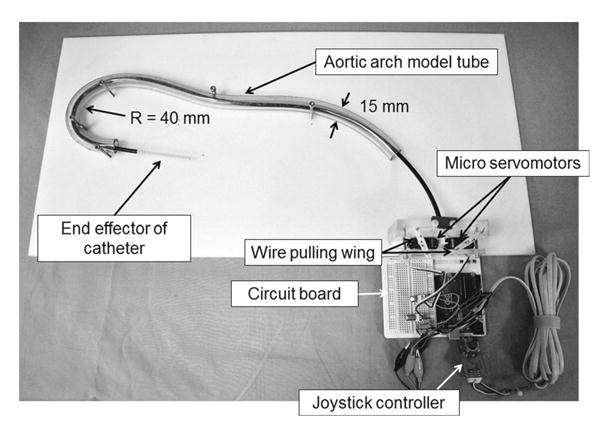
Full view of the prototype robotic catheter system. Based on the schematic shown in Fig. 4, two micro servo motors were fixed to the acrylic board side by side. The wires were tied at the hole farthest from the shaft on the wings. Output signals from a joystick controller were transmitted to a servo motor as input signals via the AVR microcomputer Arduino UNO