
Figure 7. Limb coordination during locomotion.
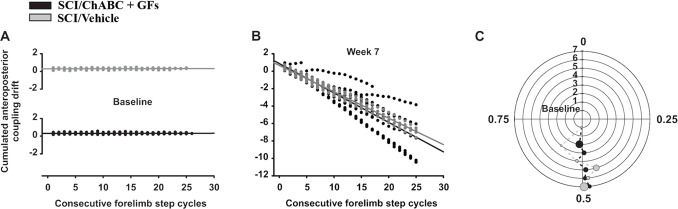
In A and B, coordination values plotted for each consecutive forelimb step cycle before and 7 weeks after SCI respectively. Usually the coordination measurement is expressed using polar coordinates. To simplify the representation of the coordination drift we converted these data to fit the Cartesian model by subtracting 1 to the polar values when two contacts of the forelimb with the treadmill belt occurred during one hindlimb step cycle (i.e. different stepping frequencies). This method renders an account of the intensity of the drift represented by the slope of the consecutive plots. (C) Hindlimbs coordination is expressed between 0 and 1 (i.e. theta) in a polar plot. The polar axis represents the delays from baseline (i.e. the innermost circle) to week 7 (i.e. the outermost) post-SCI. Circumference of the circles represent the normalized duration of right step cycle while the dots position on each circle represent the relative time position of the left foot contact averaged by group (see Alluin et al., 2011 for details). In addition, the size of each dot is proportional to the polar dispersion.