
Figure 2.
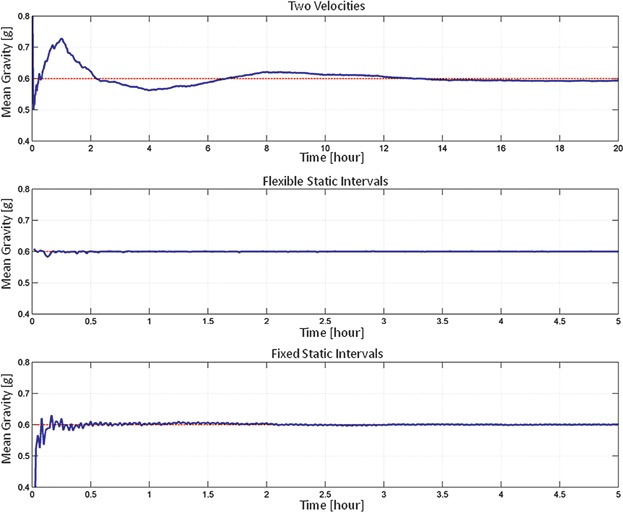
Timeline of the mean gravity values for the algorithms. The Two Velocities algorithm (top track) achieves partial gravity through position dependent rotation velocity, whereby the frames are permanently rotating. The mean gravity value is controlled with a predictive controller. In contrast, the Flexible Static Intervals algorithm (middle track) controls the mean gravity value by particular intervals between random walk and static phases. The interleaving timing of the random walk and static phases is flexible and controlled online. The Fixed Static Intervals algorithm (bottom track) works similarly but has fixed periods of random walk and static phases. The nominal rotational velocity was 60°/s for the three algorithms. Note: for presentation reasons, the time scale is not identical.