
Figure 3.
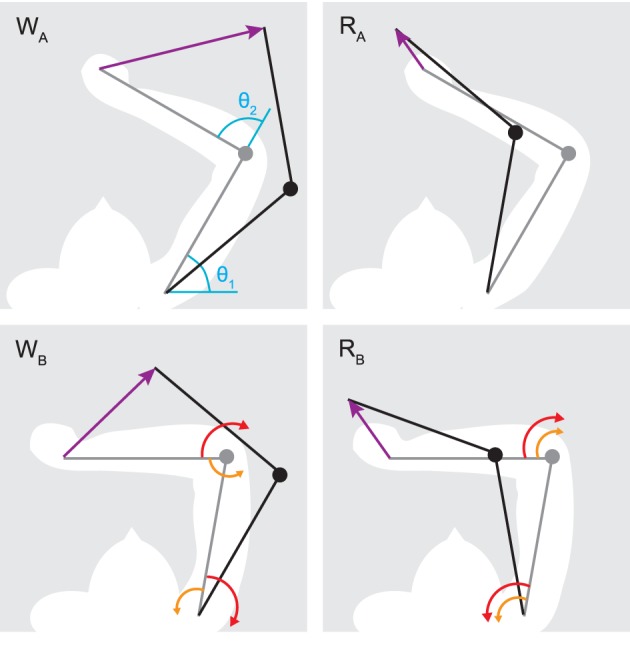
Initial (gray) and target poses (black) for reaching (RA,B) and whipping movements (WA,B). Purple arrows indicate the desired hand path. In blue are shown the origins for shoulder (θ1) and elbow (θ2) joint angles. Red arrows indicate the direction of muscle torque required to initiate the desired motion about one joint, and orange arrows the direction of interaction torques due to motion about the other. Generally, muscle torques applied at one joint result in interaction torques of the opposite direction at the adjacent joint. This leads to interaction torques assisting the motion in the case of reaching movements, and resisting it during whipping movements. Note that all movements involve joint rotations of the same amplitude (±20° for the shoulder and −30° for the elbow), only their direction changes.