
Figure 9.
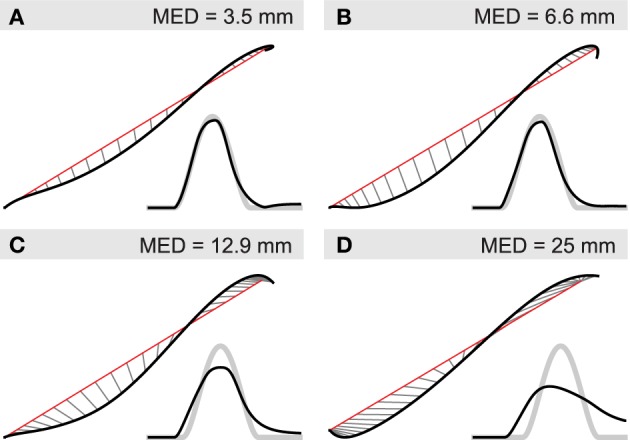
Contribution of IbIn to movement kinematics. Black lines indicate actual and red lines the desired hand position. Thin gray lines connect positions at equal points in time. Smaller insets show the corresponding velocity profile (black) and the desired velocity (thick gray). Deviations from straight line (minimum jerk) trajectories are indicated by mean Euclidean distance (MED). (A) Hand trajectory of unsevered spinal network for movement WA; (B) re-optimized system after removal of Ib connections between circuits regulating different joints; (C) re-optimized system without Ib interneurons; (D) system without interneurons.