
Figure 14. Visual feedback.
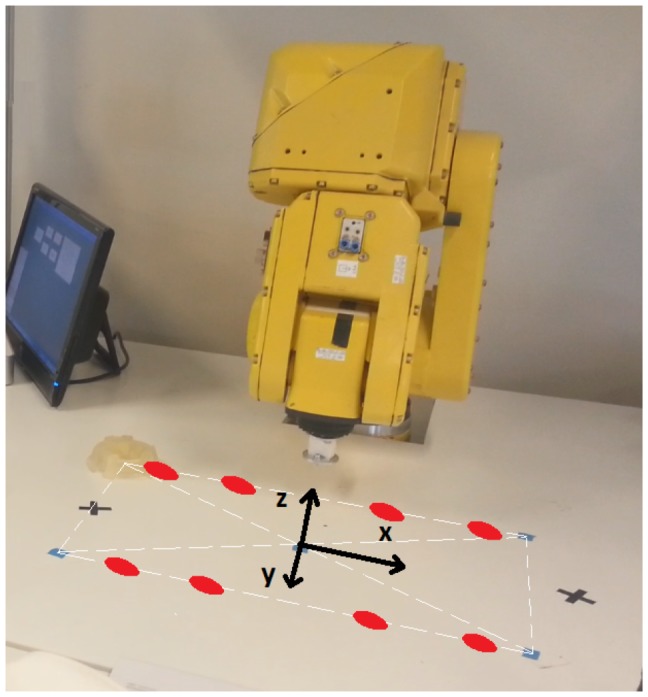
The full circle represents the direction identified by the algorithm. The robotic arm moves according to the direction shown on this interface.
Official websites use .gov
A
.gov website belongs to an official
government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you've safely
connected to the .gov website. Share sensitive
information only on official, secure websites.
The full circle represents the direction identified by the algorithm. The robotic arm moves according to the direction shown on this interface.