
Figure 8.
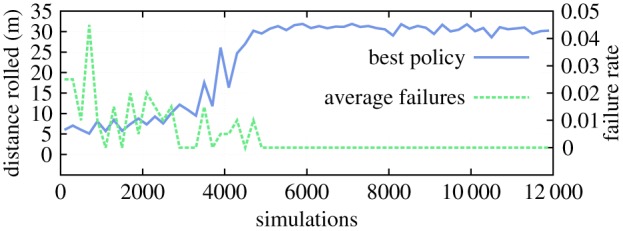
Distance covered by the robot in 60 s with distributed learning of open-loop controllers based on coevolutionary algorithms. Each of the 24 outer-shell spring–cable assembly controllers has a different evolution pool, but their combined behaviour is optimized. (Online version in colour.)