
Figure 11.
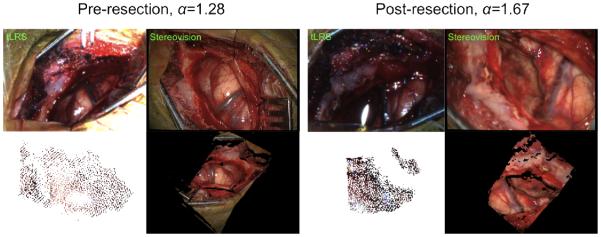
Clinical case #1 tLRS point clouds taken at different time points (pre-resection (, post-resection ) and from our stereovision system is shown. The tLRS’ point cloud is acquired at a specific working distance and at a different angle from the operating microscope, this is apparent in the tLRS bitmap. The tLRS point cloud has been made larger for visualization purposes. The stereovision point clouds and the tLRS point clouds were manually aligned for the error analysis shown in Table 4. Note, the presented algorithm for magnification factor estimation runs for the duration of the surgery to size the post-resection point cloud correctly.