
Figure 3.
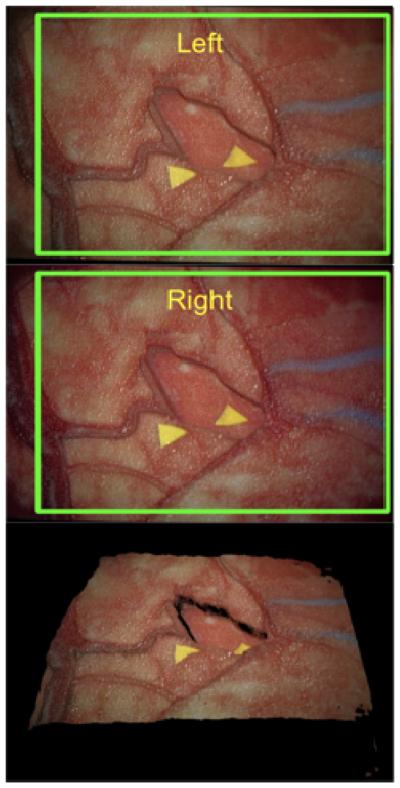
Block Matching (BM) stereo reconstruction results on the cortical surface phantom. The point cloud is shown at the bottom. The green rectangles indicate the FOV common to the left and right cameras, and BM uses this FOV to compute the point cloud.