
Figure 2.
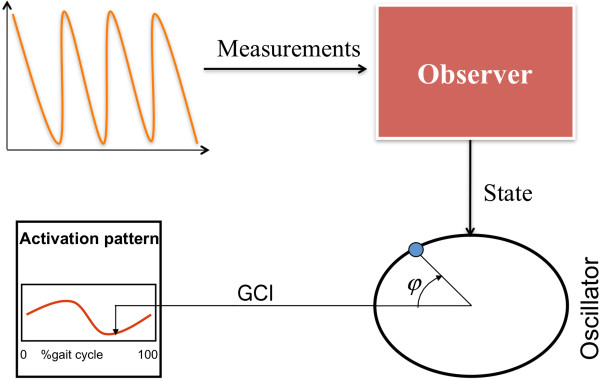
Principle of the observation algorithm. Inertial measurement unit (IMU) is used to estimate unaffected leg shank angle. The measurement of the shank angle is set as an input to the state observer that estimates the variable φ. The gait cycle index (GCI) is calculated from variable φ and used to trigger the electrical stimulator.