
Fig. 1. Configuration for parallel dual-site control.
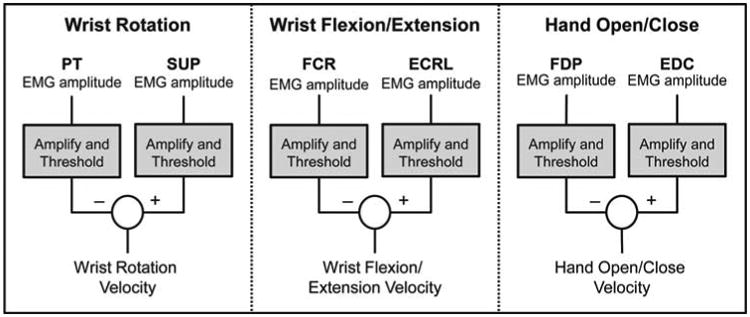
For each DOF, a pair of antagonistic muscles was used to control output velocity. The differences in EMG signal amplitude for the two muscles were calculated after each amplitude was conditioned by a linear gain and threshold. The muscles used included pronator teres (PT), supinator (SUP), flexor carpi radialis (FCR), extensor carpi radialis longus (ECRL), flexor digitorum profundus (FDP), and extensor digitorum communis (EDC).