
Fig. 2. Fitts' Law Task.
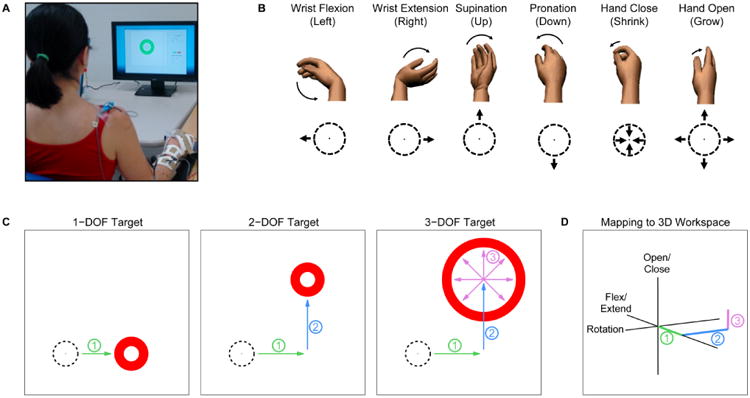
(A) Experimental setup. Able-bodied subjects controlled a ring-shaped cursor in a virtual environment. Subjects were restrained in a forearm splint to produce isometric contractions. (B) Ring cursor control mapping. Subjects controlled the ring cursor using an intuitive mapping originally proposed by Scheme and Englehart (2012). Wrist flexion/extension controlled horizontal displacement, pronation/supination controlled vertical displacement, and hand open/close controlled the radius of the ring. (C) Target complexities. Subjects were instructed to move the ring cursor into a variety of annulus-shaped targets. Three different levels of target complexity were presented to subjects. 1-DOF targets required use of only one DOF to complete the task (e.g. wrist extension). 2-DOF targets required use of two DOFs to complete the task (e.g. wrist extension and supination). 3-DOF targets required use of all three DOFs to complete the task (e.g. wrist extension, supination, and hand open). (D) Relationship between two-dimensional ring task-space and a three-dimensional workspace. The location and radius of each target in the ring task space corresponded to a target location in a corresponding three-dimensional workspace from which target distance was calculated (Eq. 3). The path numbers shown (1-3) correspond to movements depicted in (C).