
Figure 1.
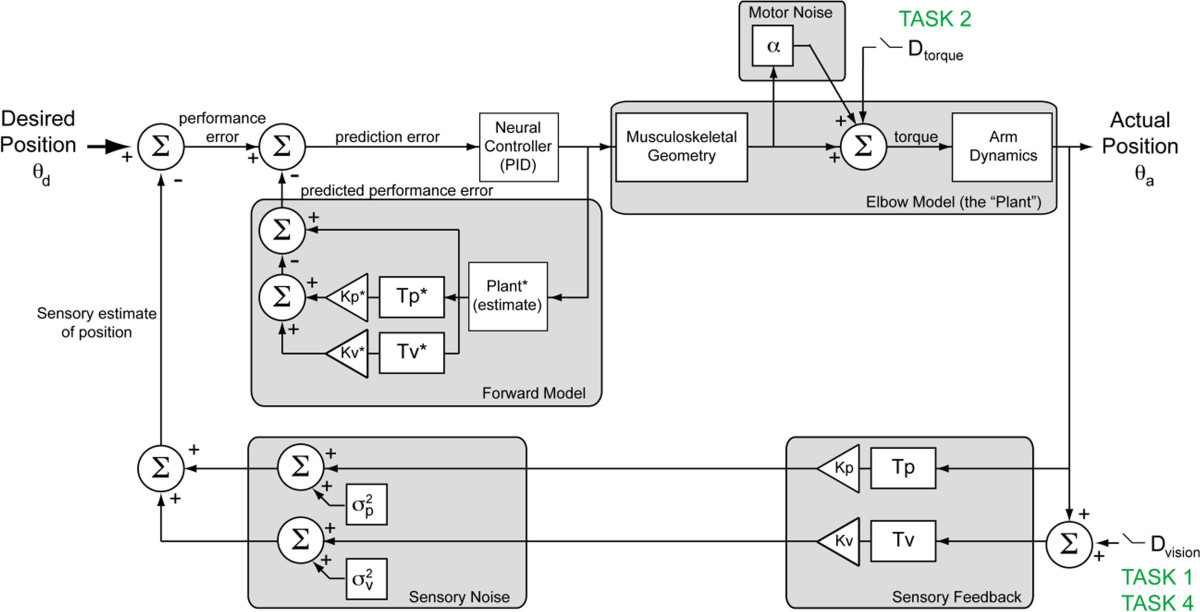
Multisensory feedback model of sensorimotor control. The model consists of a feed-forward motor control path and three nested feedback paths. The outermost feedback path accounts for sensory (visual and proprioceptive) feedback. In the forward path, neural processing associated with the correction of state errors (i.e. the difference between desired, θd, and observed, θa, elbow angles) is modeled generically by a PID controller (inverse model) containing separate proportional, integral, and derivative gains. Motor noise in the generation of torques is modeled by a multiplicative noise (α). Corrective torque is converted to angular position of the arm using a 2nd order model characterizing the inertia, viscosity, and stiffness about the elbow. In each branch of the outer-most feedback path, arm position is delayed (T) and weighted (K) to provide a combined sensory estimate of arm position. The forward model provides predictive compensation of the arm dynamics and delays via the inner feedback loops. Dext denotes external perturbations applied to the perceived visual and/or proprioceptive (i.e. physical) feedback of arm position.