
Fig.3.
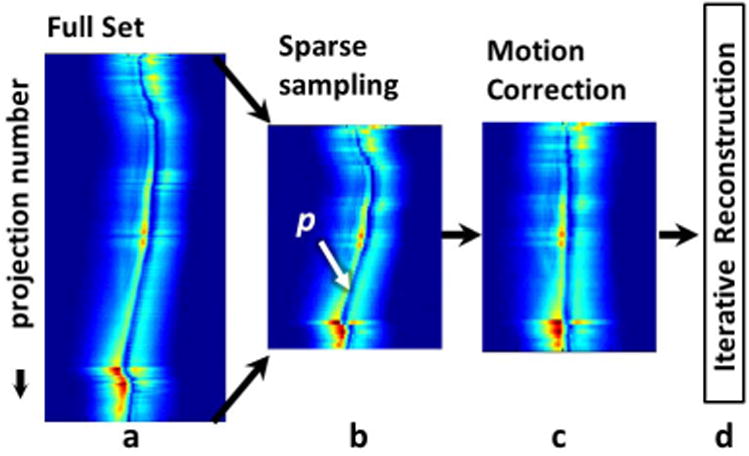
Acceleration and motion correction method showing: (a) azimuthal projection amplitudes; and (b) under-sampling of projections to a reduced dataset. (c) Motion correction consists of detecting probe p in each projection (signal void) and re-aligning every azimuthal projection on p and/or eliminating projections with excessive motion. (d) Images from the sparsely sampled motion-corrected projections are reconstructed using iterative techniques.