
Figure 13.
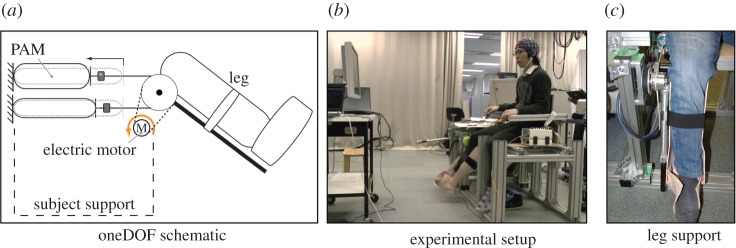
Robot used during our experiment [104]: (a) PAM and electric actuators exert parallel torques to move the leg (1 d.f. design); (b) Experimental set-up; (c) Thermoplastic polymer leg support anchored to robot and holding up subject's leg. (Online version in colour.)