
Figure 3.
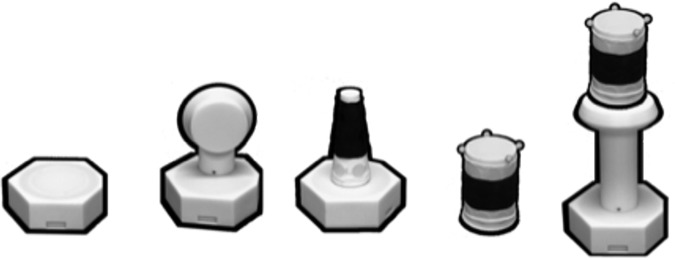
The collection of task objects (from left to right): flat, planar object for fully supported reach to touch; button for slightly elevated reach to touch; cone for fully supported reach to grasp; cylinder for fully supported reach to grasp with larger hand aperture; and cylinder on an elevated platform for reach to grasp against gravity. The cylinder object was used for transportation tasks, in which it was moved between 2 locations on or elevated off of the table.