
Fig. 4.
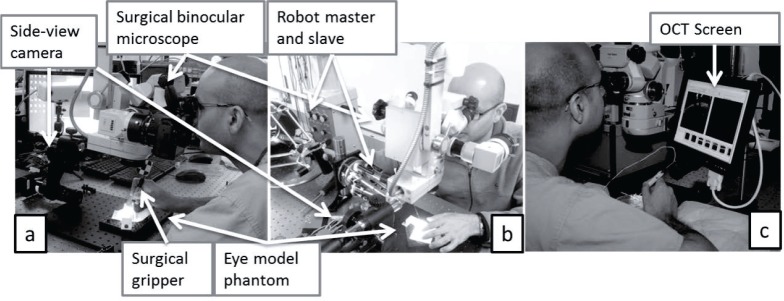
Experimental layout for manual and robot-assisted tasks. (a) For manual manipulation, the surgeon held an ophthalmic forceps or B-scan OCT-forceps and manipulated the forceps through a mockup sclerotomy constraint above the gelatin retinal phantom. (b) For robotic manipulation, the surgeon held the robot master device and controlled the slave robot to manipulate a customized ophthalmic forceps. (c) Layout with a small side-view OCT screen to improve visualization of real-time OCT feedback.