
Figure 4.
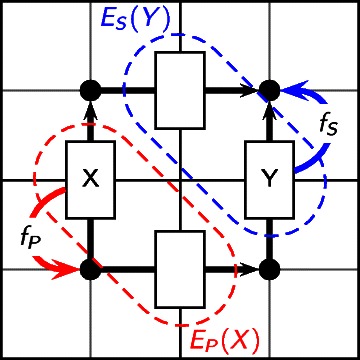
Predecessor and successor functions, and equivalence classes of columns. The predecessor and successor functions (f P and f S respectively) map from columns (edges) to nodes (circles) in the dynamic programming matrix. All columns mapping to a particular node under f P share the same set of possible predecessor columns, and are grouped together in an equivalence class, denoted by E P (shown in red). An analogous definition holds for E S (blue).