
Figure 6.
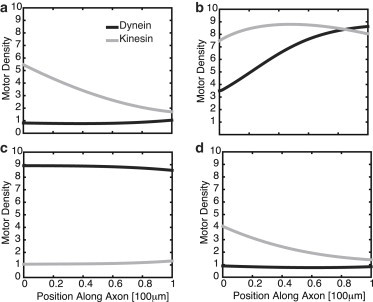
Spatial profiles for kinesin and dynein motors at different times during one cycle of period T = 2π/ω after transients have disappeared. (a) t = 0. (b) t = T/4. (c) t = T/2. (d) t = 3T/4. The initial condition for the kinesin motors is a hyperbolic secant function, whereas the initial condition for the dynein motors is zero. Here, L = 100 μm and other parameters are as in Fig. 5.