
Fig. 4.
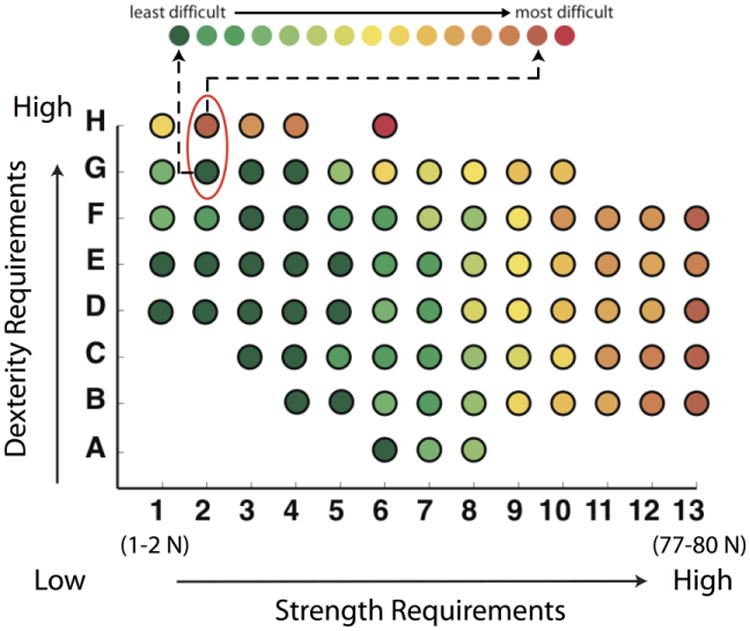
The Strength-Dexterity paradigm uses a two-dimensional plane34 to explicitly distinguish the contribution of strength from dexterity requirements. The material properties and geometry of the springs can be adjusted to be more or less prone to buckling (unstable), or more or less stiff. Stiffer springs increase the strength requirement (x axis). More slender springs increase the dexterity requirement (y axis). As shown in Vollmer et al.,45 springs in the lower range of the strength requirement (< 3 N) can be appropriate for pediatric and clinical use. They allow the quantification dexterity (i.e., the neuromuscular ability to stabilize an unstable object prone to buckling with the fingertips) while requiring little strength. Figure adapted from Valero-Cuevas et al,36 Vollmer et al.,45 and Talati et al.50 Permission to reprint from Dayanidhi et al.37 was received.