
Figure 4.
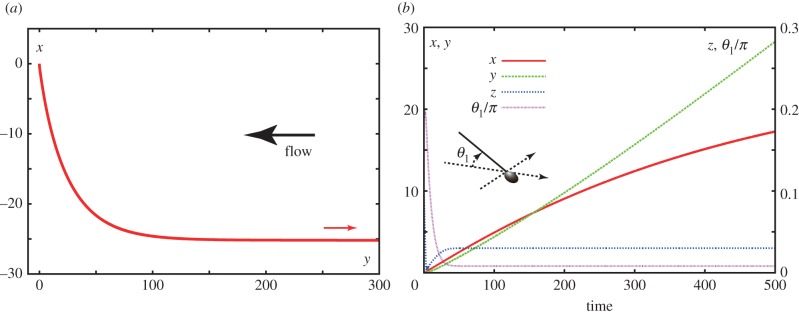
Planar swimming sperm dynamics in a background flow and surface repulsion potential, specified by the parameters of table 2. (a) A virtual sperm in the presence of a no-slip surface is considered with sperm parameter values of table 1, and the further specification with Γ = ∞, α = 0, θinit = 0.2π and the sperm is initially located at X(s = 0, t = 0) = (0, 0, 0.1). The projection of the trajectory onto the plane of the no-slip surface is plotted for this sperm with the smaller arrow showing the direction of swimming. (b) A further breakdown of this virtual sperm's trajectory, with plots of x, y, z as a function of time together with θ1, its angle of attack relative to the no-slip surface, that is the angle between the ξ3 axis and the no slip surface z = 0. The sperm head in the figure is solely for illustration of the definition of the angle and has not been considered in the modelling. (Online version in colour.)