
Figure 3.
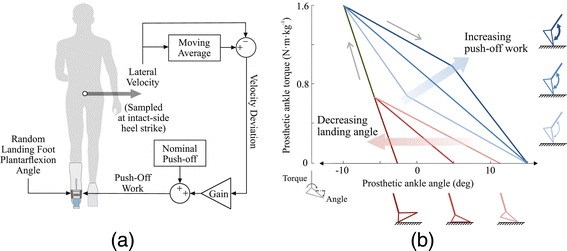
Control architecture.(a) The high-level controller determined desired ankle push-off work based on mediolateral velocity once per step. Desired push-off work was calculated at the instant of intact-side heel strike, and was equal to a nominal value plus the product of a gain and the difference between lateral velocity on that step and the average lateral velocity over the prior ten steps. Landing-angle disturbances were randomly selected at the beginning of each swing phase. (b) The low-level controller continuously regulated ankle torque within each step according to a desired torque-angle relationship. The torque-angle curve was updated by the high-level controller on each step, reflecting changes in desired push-off work (blue portion) and landing-angle disturbance (red portion).