
Figure 4.
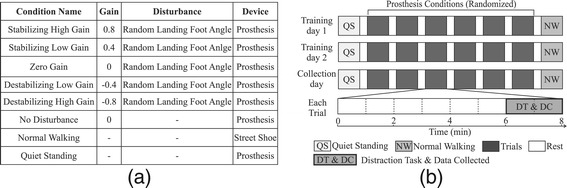
Experimental protocol.(a) Each day of the experiment included eight conditions, five of which compared high-level control gains and three of which provided baseline data. During all controller conditions, a disturbance was applied in the form of randomly-changing landing foot angle. In the No Disturbance baseline condition, the high-level gain was set to zero and the disturbance was not applied. In the Normal Walking baseline condition, subjects walked in street shoes without the prosthesis. In the Quiet Standing baseline condition, subjects stood still while wearing the prosthesis. (b) Each subject participated in two training days followed by a collection day. Each day, subjects were presented with Quiet Standing, followed by the six prosthesis conditions in random order, and finally the Normal Walking condition. Subjects walked for eight minutes in each trial, followed by three minutes of rest. During minutes six through eight, subjects completed the distraction task. All results presented in the main text are from data collected in minutes six through eight of each trial on the third day.