
Figure 5.
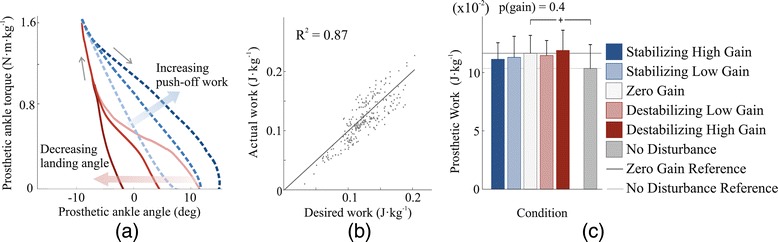
Ankle-foot prosthesis mechanics.(a) Measured torque-angle relationships for three landing angles and three push-off work values. The red solid lines show the average of all steps in which landing angle was less than 1° (dark line), between 5° and 7° (medium line), and greater than 9° (light line). The blue dashed lines show the average of all steps in which net ankle push-off work was less than 1.3 times the value in Normal Walking (light line), between 1.8 and 2.3 times normal (medium line), and at least 2.8 times normal (dark line). (b) The low-level controller closely tracked the desired angle-torque curve, resulting in a strong correlation between desired and measured ankle push-off work on each step. Data are shown for a representative trial. (c) Average push-off work remained within 5% of the value for the Zero Gain condition across all other control gains. Subjects received slightly less energy per step in the No Disturbance baseline condition. Blue bars correspond to Stabilizing Gain conditions, white bars to the Zero Gain condition, and red bars to Destabilizing Gain conditions. Darker blue and red bars correspond to High Gains. Light gray bars correspond to the No Disturbance condition. The p-value at top is for a repeated measures ANOVA test for an effect of control gain. Pluses (+) indicate statistical significance among baseline conditions.