
Figure 1.
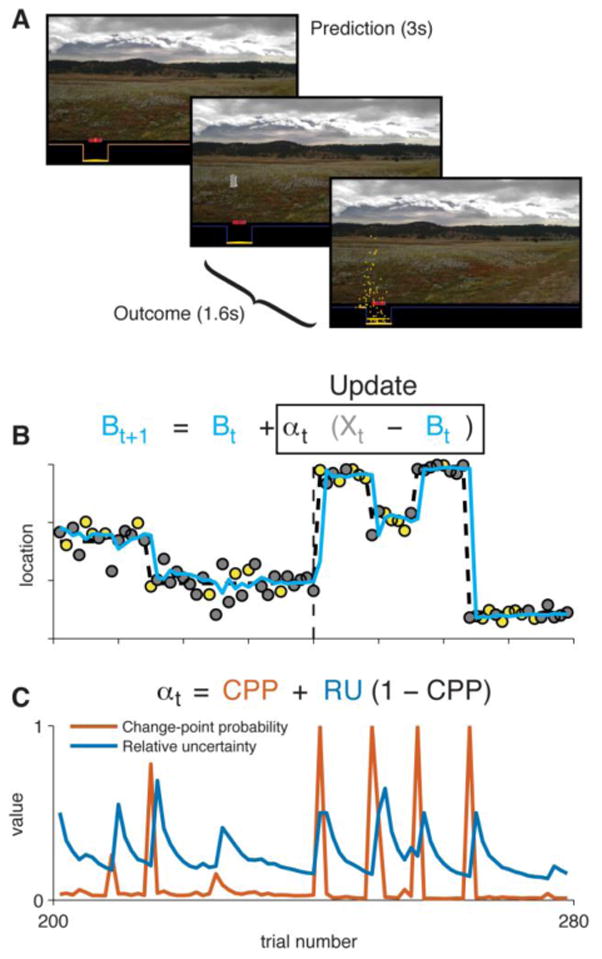
Task overview and theoretical predictions. A: Screenshots of the experimental task. Participants positioned a bucket, trying to predict where a bag would drop from an occluded helicopter. B: An example sequence of trials. Data points mark the location at which successive bags fell (yellow = rewarding outcome, gray = neutral outcome). Heavy dashed line marks the true generative mean, which had periods of stability with occasional change points. Cyan line marks the predictions of an approximate Bayesian model. Inset equation presents the model’s belief-updating rule (Bt = belief, Xt = observed outcome, αt = learning rate on trial t). Vertical dashed line marks the boundary between a high-noise condition (left) and low-noise condition (right), reflected in different levels of stochastic variance around the generative mean. C: Two theoretical influences on learning rate across trials. Change-point probability (CPP) is elevated when an unexpectedly large prediction error occurs. Relative uncertainty (RU) is elevated subsequently and slowly decays as a more precise estimate of the current mean is reached. Inset equation shows how CPP and RU jointly determine the adaptive learning rate.