
Figure 4. Characterization of PDMS micro-tentacle actuation.
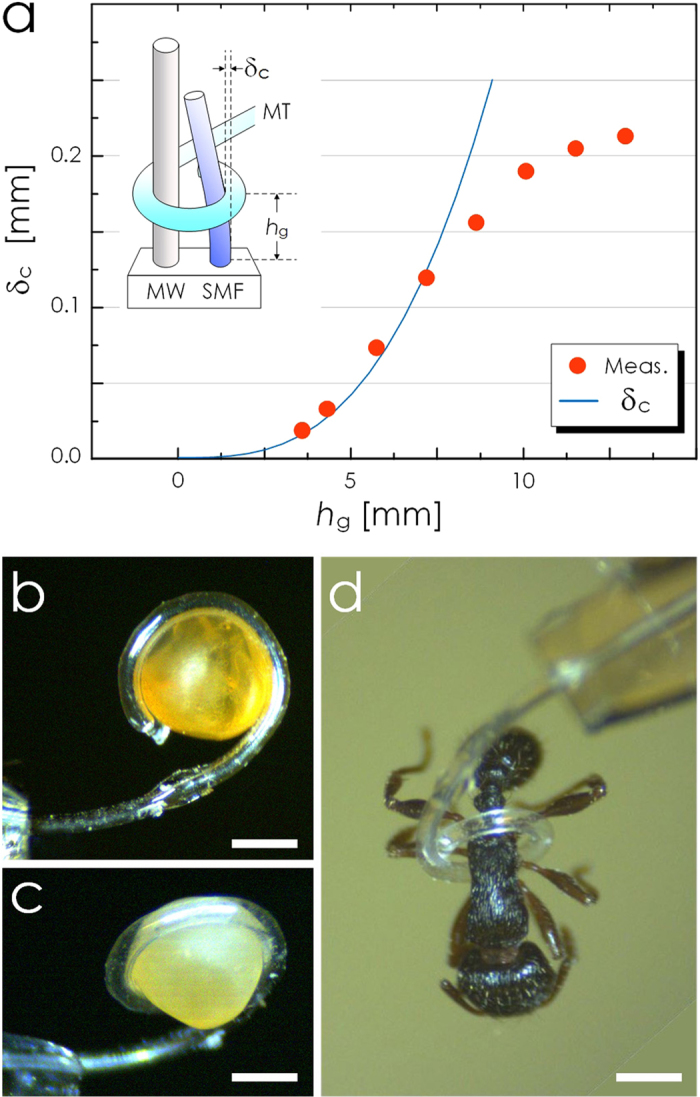
(a) Measured deflection of the cantilever due to the PDMS micro-tentacle’s grabbing force. The inset shows the experimental setup (MW: metal wire, SMF: glass optical fiber, MT: micro-tentacle). The solid line represents δc, the deflection at the grabbing point (hg), calculated based on the standard beam deflection theory with the point-loaded force of 0.78 mN. The measured δc begins to deviate from the theory after it exceeds 90 μm, the maximum stroke achievable with the current setup. (b) and (c) Optical micrographs showing the micro-tentacle’s ability to grab and hold a Mallotus villosus egg by winding around it conformally. (d) Optical micrograph of another micro-tentacle grabbing and holding an ant. (Scale bar: 500 μm for all).