
Fig. 4.
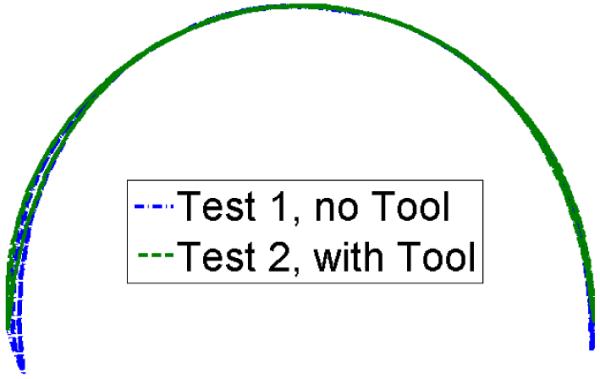
Tip position of the manipulator throughout the experiments as measured by the 2D/3D registration routine. Note the slight hysteresis on bends to the left. When the tool is inserted, the manipulator tip follows approximately the same trajectory, except it does not achieve as much bending under the same maximum allowable tension of 22.2N.