
Fig 5. Functional upper body model with segment frames (left), technical sensor frames (right), and DOF in parenthesis.
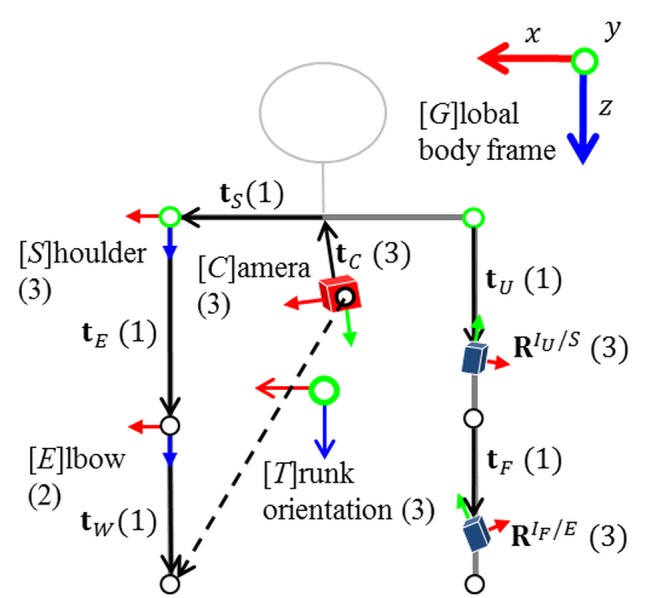
In the nominal pose, all joints are aligned with the global body-centered frame of reference, G, which is position-less, aligned with gravity and assumed at rest. Sensor poses are given relative to the associated joint.