
Fig 6. Parallel controllers do not lead to increased stability.
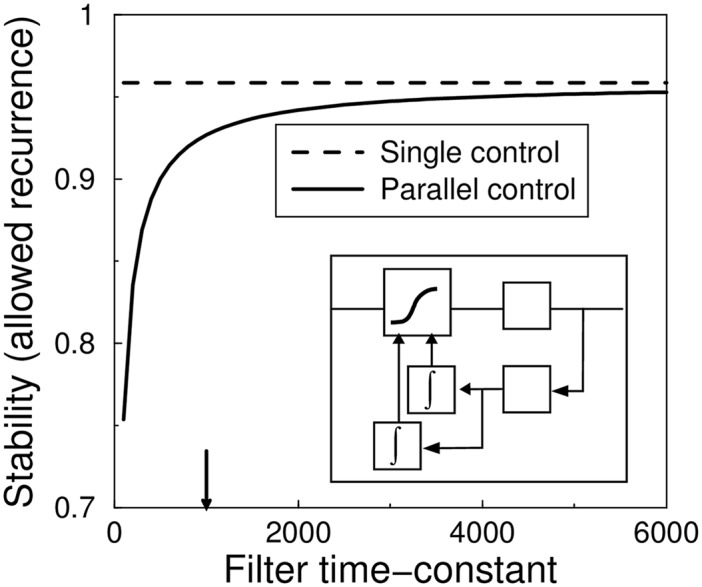
The maximal recurrence is plotted against the time-constant of the second feedback loop. The τ 3 time-constant of the system with single feedback is indicated by the arrow. The system with the extra feedback loop (solid curve) is always less stable than the system with a single feedback loop (dashed line), even if the additional feedback is much slower than the original one. The control loop is shown in the inset.