
Fig. 2.
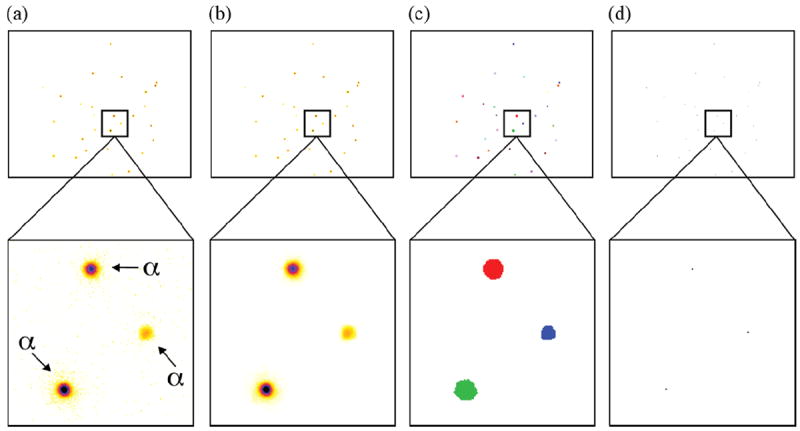
iQID frame parsing algorithm: (a) raw CCD camera frame where the magnified region shows three alpha particles, (b) median-filtered image with noisy pixels removed, (c) filtered image with individual particles identified using a connected components labeling algorithm [10,11], and (d) the estimated 2D interaction position. The position estimate, time stamp, summed pixel values, and all associated event pixels are concatenated and written to disk as a listmode event entry.