
Figure 3.
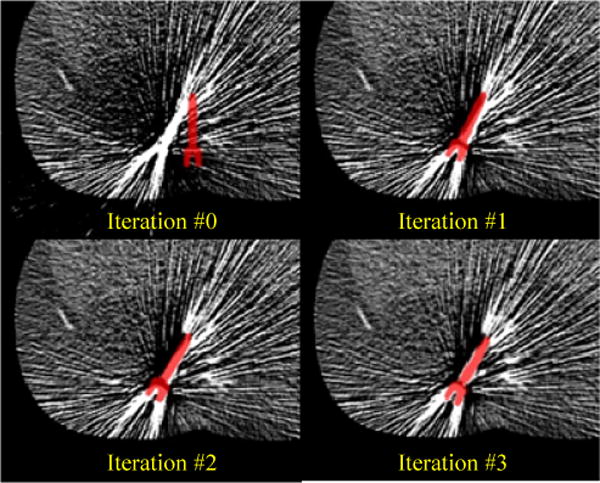
A sequence of KCR estimated axial slices and implant poses from initial guess to iterations one through three. The pose estimate of the pedicle screw is represented by the red image overlay on the estimated background volume. Iteration zero represents initialization by an FBP reconstruction for the image background and arbitrary placement of the pedicle screw component model in proximity to the true location. Note the simultaneous nature of the estimation process with both registration updates and image updates between successive iterations.