
Figure 1.
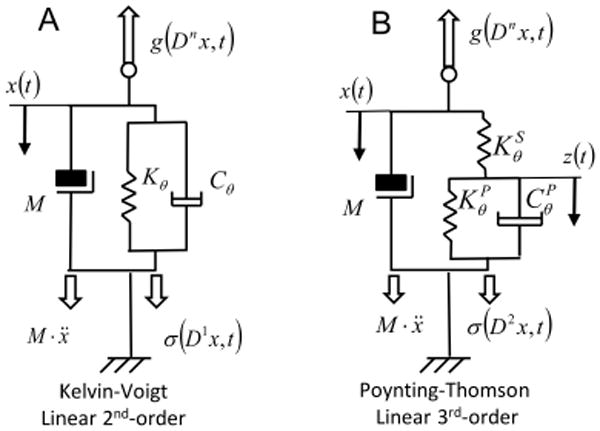
Mechanical models of muscle-tendon systems. A) Second-order viscoelastic linear system (Kelvin-Voigt). B) third-order viscoelastic linear system (Poynting-Thomson). The schematics highlight the different force fields of the D'Alembert equation - Eq.(1) -. In the figure, each force field is a function of the mechanical elements that generates it.