
Fig. 3.
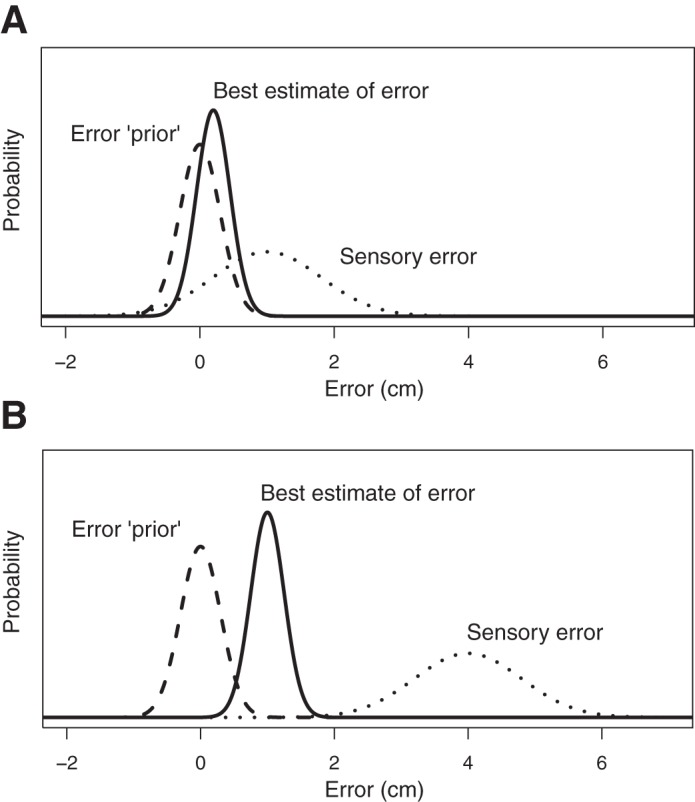
Proposed error processing for our passive drift model during early drift (A) and late drift (B). The best estimate of error grows as the hand moves farther from the target, and drift would plateau when the magnitude of the best estimate of error is equivalent to the magnitude of the motor bias.