
Figure 6.
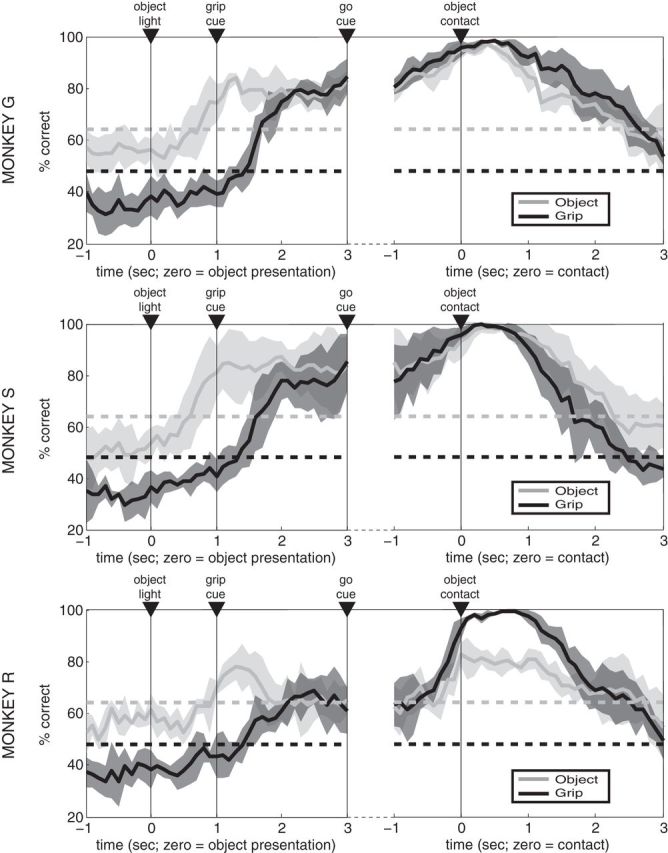
Decoding object and grip type. A nearest-neighbor classifier using leave-one-out cross validation was used to classify both grip type and object strategy at each time point based on SSIMS projections generated using partially overlapping 1 s windows (50 ms shifts). Results for each monkey are shown separately (mean over 4 sessions in each animal, with shading denoting SD). The upper bounds for the 99% confidence intervals (dashed lines) for object/grip classification were determined using 10,000 random shuffles of the trial labels (values differ because there are 3 grips and 2 objects).