
Figure 1.
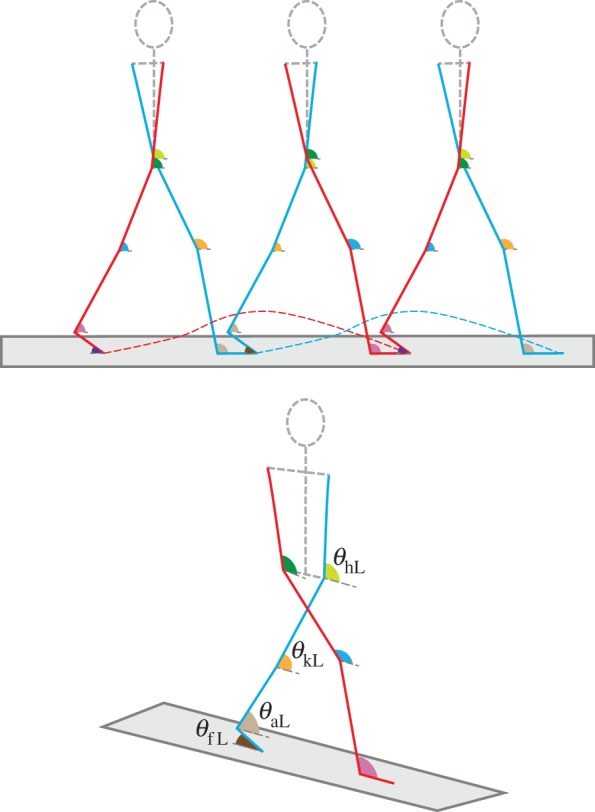
Visualization of leg angle vector θ. The left leg (blue) and right leg (red) alternate between stance and swing phase over the course of a stride. The variables θfL, θaL, θkL and θhL correspond to the left foot, ankle, knee and hip angles, respectively. The corresponding right leg angles, θfR, θaR, θkR and θhR, are not labelled. The eight leg angles and their respective angular velocities form the 16-dimensional state vector.