
Fig. 10.
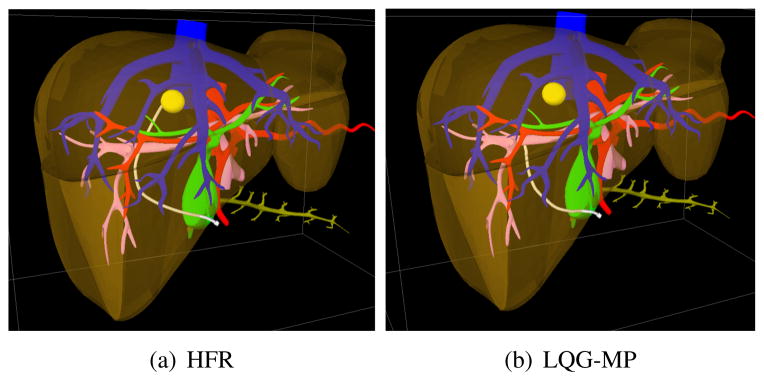
HFR applied in simulation to medical needle steering in the liver for a biopsy procedure at a different site from Fig. 1. The needle is inserted from the front. (a) HFR successfully guides the needle (white) to the tumor (yellow). Using LQG-MP (b), the needle collides with portal veins (pink).