
Fig 2. Modelling thermotaxic individuals.
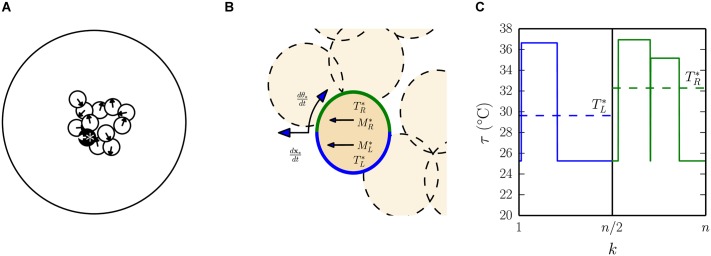
(A) A snapshot of the model, showing twelve simulated pups (small circles) in a circular arena (large circle), with orientations indicated by arrows. In this snapshot, pups are shown aggregated, often overlapping, and a focal pup is highlighted by a black body and a white *. (B) The same snapshot is shown, zoomed in on the focal pup. The left and right sides of its body are coloured green and blue respectively, to indicate the regions of the body surface over which average temperatures constitute the left and right sensor values and . To implement thermotaxic control, these sensor values set the drive speed of contralateral motors and , which change the position x and orientation θ of the pup. (C) For the focal pup, the temperature (τ) registered at discrete positions around the body circumference (indexed by k) is shown. For the focal pup is greater than , indicating that it is warmer on the right than the left, hence at this point in time and therefore the pup will orient clockwise. See Models for precise definitions of these terms.