
Figure 1. 3-D neuromuscular human model walking over rough ground with height changes up to ±10 cm (snapshots every 600 ms).
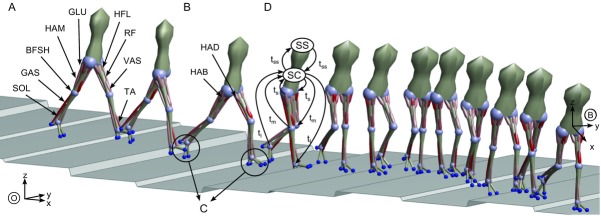
The model consists of 7 segments connected by 8 revolute joints and actuated by 11 muscles per leg. A, 9 muscles actuate the sagittal plane joints at the hip, knee and ankle. B, the hip is further actuated in the lateral plane by 2 muscles. C, each foot has 4 contact points generating continuous ground interaction forces when engaged. D, the neural circuitry of the spinal cord (SC) controlling the muscles is organized into 10 functional modules that are subject to long (tl), medium (tm), and short transmission delays (ts). The communication between the spinal cord and the supraspinal system (SS) adjusting the foot placement is equally delayed (tss).