
Fig. 1.
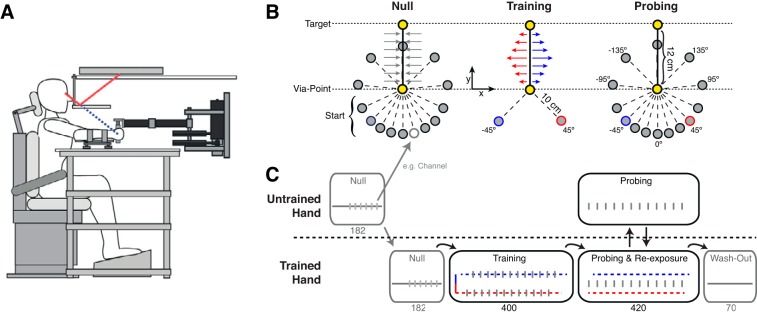
Experimental design. A: setup. Subjects were seated in front of a robotic rig performing reaches while holding the handle of a planar robotic manipulandum (vBot). Both arms were resting on air sleds floating on a glass-top table. Reproduced from Franklin and Wolpert (2008) with permission. B: task. Reaches were performed starting with a premovement from start position to via-point. This was followed by a movement from via-point to target. Premovement directions and perturbation couplings used within the null, training, and probing blocks are shown. C: paradigm: illustration of the force field schedule within each block. Vertical gray bars denote error-clamp trials.