
Fig. 2.
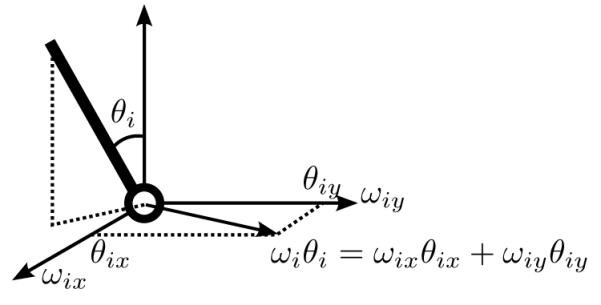
Rotation of the i-th joint. Since the rotation of one joint is considered in this case, the location of the joint, denoted by qi with respect to the base frame can be neglect, and the rotation axis ωi is used instead of the twist ξi.
Official websites use .gov
A
.gov website belongs to an official
government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you've safely
connected to the .gov website. Share sensitive
information only on official, secure websites.
Rotation of the i-th joint. Since the rotation of one joint is considered in this case, the location of the joint, denoted by qi with respect to the base frame can be neglect, and the rotation axis ωi is used instead of the twist ξi.