
Fig 11. Comparison between real and reconstructed trajectory.
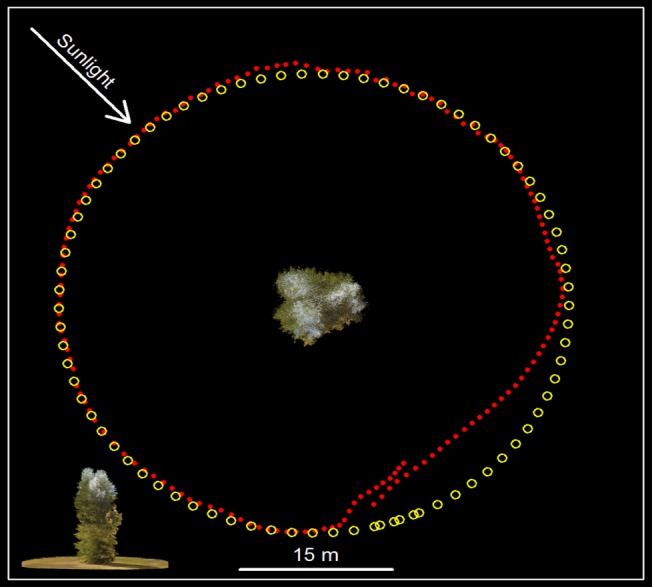
Nadir view of reconstructed tree with camera GPS locations at image frame acquisition moments (yellow circles) and VSfM-calculated locations (red dots). Frame frequency 2Hz, GPS fixes at 1Hz. Inset at the lower left shows lateral view of the reconstructed tree.