
Figure 10. Modifying the countermanding model .
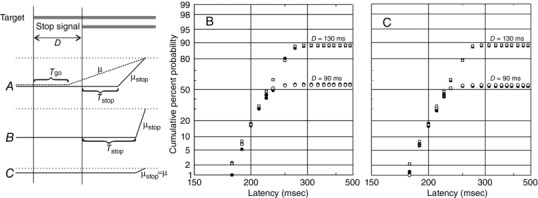
In the original model, there is a race between a Go unit and a Stop unit, which starts after a delay D; both have the same fixed delay T go = T stop, although μstop is greater than μgo, such that the Stop process frequently overtakes the Go (A, left), with the decision signal reaching the threshold level (dotted line) sooner. Estimates of μstop in countermanding are smaller than we have observed for the Wheeless task, although the original countermanding behaviour can be accurately simulated with the increased value for μstop if T stop is increased as well, relative to T go. The results of such a simulation are presented in reciprobit plot B, which shows uncancelled responses in countermanding trials, with ΔT = 0 (filled symbols: μstop = 13.8 Hz, σstop = 3.0 Hz) and ΔT = +26 ms (open symbols: μstop = 24.0 Hz, σstop = 5.0 Hz). Simulations are shown for D = 90 ms and D = 130 ms; for all cases, μ = 6.11 Hz, σ = 1.05 Hz and T go = 60 ms. Each simulation is of 1,000 trials, and the distributions for each value of D are not significantly different (P > 0.5, K–S 2). Furthermore, by assuming a reduced threshold level for the stop process (C, left), the values of μ and σ for the Stop unit can be the same as for the Go unit. Reciprobit plot C compares simulated reaction times, as in B, for the original model and for one in which μstop = μgo and σstop = σgo: the distributions are again statistically indistinguishable (P > 0.5, K–S 2).