
Figure 4.
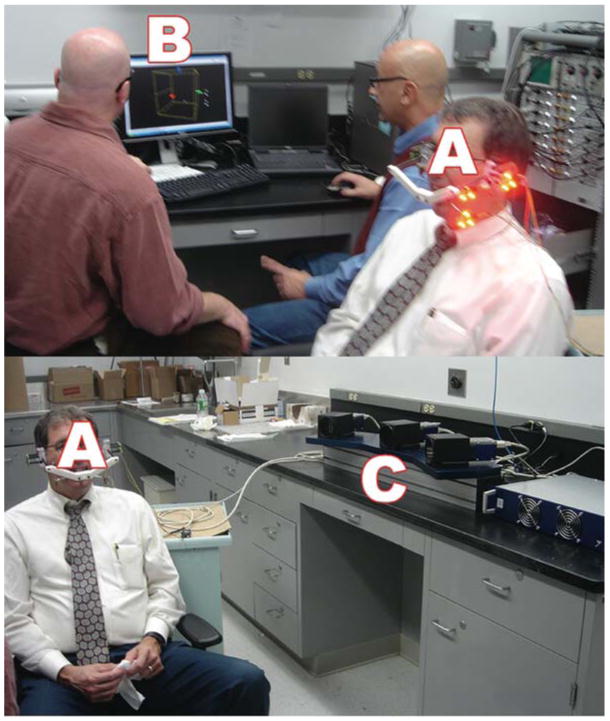
Opto-electronic tracking and capture of movement of the mandible in real-time. Three triangular target frames, carrying three non-collinear light emitting diodes (LEDs) each (A) are shown for the left side. The most posterior target frame is attached to the head reference system and occlusal registration appliance. The two anterior target frames defined maxillary and mandibular coordinate systems and were fixed temporarily to the vestibular surfaces of maxillary and mandibular canines and first premolars on one side by means of custom splints. The LEDs determined head- and mandible-related coordinate systems (B). The time-varying maxillary and mandibular LED positions were recorded by three linear cameras (C) with fixed geometry and resolution of better than 10 μm at a sampling frequency of 200 Hz. Motion of the lower jaw was calculated relative to the head, thus, head motion was eliminated. Motion was viewed in real time during the experiments (B).