
Fig. 4.
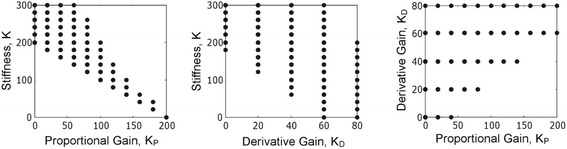
The gain combinations that stabilized the model used in the simulation study. K P is the proportional gain, K D is the derivative gain of the proportional-derivative (PD) controller used to emulate the neural control, and K is the mechanical stiffness contribution. The figure shows the relationship between the parameters