
Figure 6.
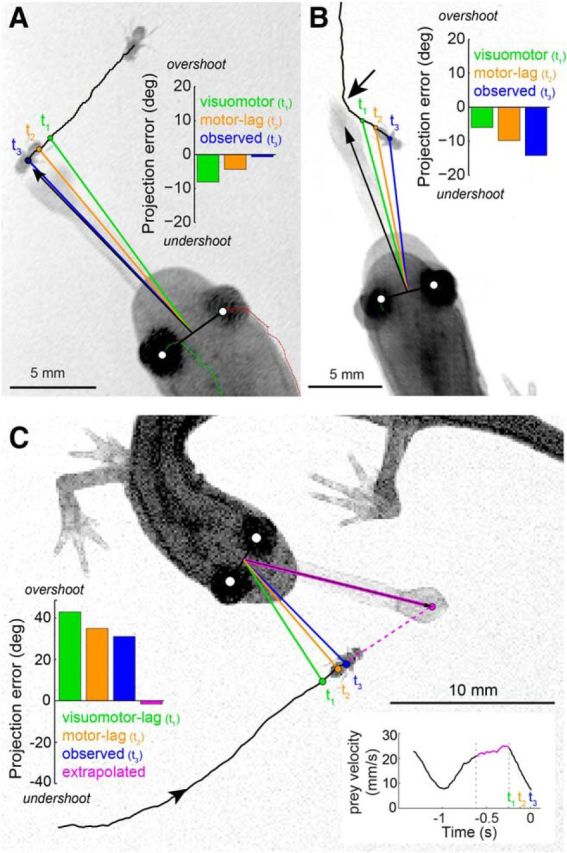
Salamander tongue projections are aimed at a predicted prey location. A, Example of a projection aimed at a prey that moved with near-constant velocity on a continuous trajectory. The visuomotor-lag model would target the prey at position t1 (i.e., one sensorimotor latency behind its final position). The motor-lag model would target prey at position t2, one motor delay behind its final position at the onset of the head turn. t3 marks the measured final prey position at the time of tongue projection. Evaluation of the relative angle between tongue and prey at t1, t2, and t3 (bar plot, inset) shows that the tongue lands nearest to the prey at t3. B, Example of a projection aimed at a prey that moved with near-constant velocity on a discontinuous trajectory. Visuomotor-lag, motor-lag, and final prey position marked as in A. The tongue lands at a location that is distant from the final prey position at t3, but where the prey would have been had its trajectory remained continuous (dim light conditions; arrow indicates turn ∼300 ms before t3). C, Example of a projection aimed at a prey that stopped moving at the onset of the projection head turn (t2). The tongue lands well ahead of the prey. Extrapolation of the prey's motion before the head turn (bottom right inset; magenta) predicts the prey position after the head turn. This extrapolated position is consistent with where the tongue was projected and considerably different from both the observed final prey position (t3) and the visuomotor-lag (t1) and motor-lag (t2) models.