
Fig. 1.
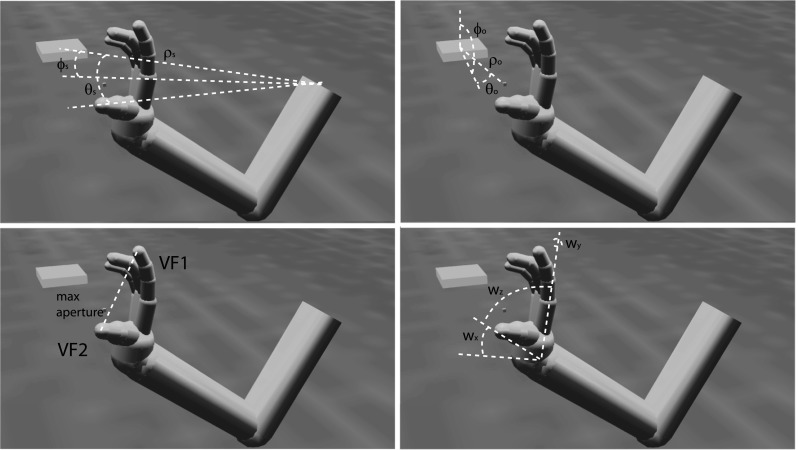
Reach and grasp parameters encoded by the premotor cortex. The small cube denotes the planned reach offset point, and the larger rectangular prism is the object to be grasped. As explained later, area F2 encodes the shoulder-centered object position, , , , F7 encodes the object-centered reach offset, , , , F5 encodes the VF combination and maximum aperture used for the grasp, and F2/F5 encodes the wrist orientation , ,